前 言
第1 章
绪论
1.1 智能驾驶环境感知技术背景/ 001
1.1.1 智能驾驶的发展背景/ 001
1.1.2 智能车辆的研究现状/ 005
1.1.3 复杂场景感知技术的重要性/ 009
1.2 复杂场景感知技术发展现状/ 010
1.2.1 早期理论探索与传统感知技术/ 010
1.2.2 基于深度学习的复杂场景感知技术/ 012
1.3 复杂场景的感知需求及关键挑战/ 015
1.3.1 复杂场景的具体感知需求/ 015
1.3.2 复杂场景感知技术的关键问题/ 017
1.3.3 未来研究方向展望/ 019
1.4 本章小结/ 020
第2 章
复杂场景感
知的深度学
习方法
2.1 图像预处理方法/ 021
2.1.1 图像平滑/ 021
2.1.2 尺度归一化/ 023
2.1.3 Focus 切片处理/ 024
2.1.4 数据增强/ 025
2.2 卷积神经网络/ 027
2.2.1 卷积神经网络关键模块/ 027
2.2.2 模型优化方法/ 032
2.2.3 经典特征提取网络/ 034
2.3 循环神经网络/ 039
2.3.1 循环神经网络概述/ 039
2.3.2 循环神经网络的衍生模型/ 041
2.3.3 循环神经网络的不足及其发展趋势/ 045
2.4 Transformer / 047
2.4.1 Transformer 概述/ 048
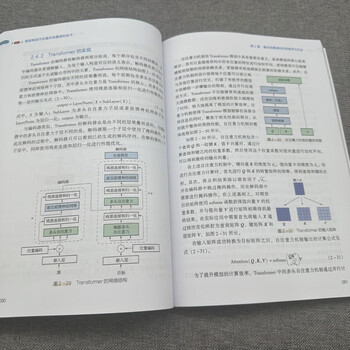
2.4.2 Transformer 的实现/ 050
2.4.3 Transformer 的不足及其发展趋势/ 052
2.5 生成对抗网络/ 054
2.5.1 生成对抗网络概述/ 054
2.5.2 生成对抗网络的衍生模型/ 056
2.5.3 生成对抗网络的不足及其发展趋势/ 060
2.6 本章小结/ 062
第3 章
面向智能驾
驶复杂场景
感知的目标
检测技术
3.1 目标检测关键问题的理论方法分析/ 063
3.1.1 边界框回归损失相关理论分析/ 064
3.1.2 注意力机制相关理论分析/ 068
3.1.3 模型训练策略相关理论分析/ 073
3.1.4 多尺度特征学习相关理论分析/ 074
3.2 两阶段目标检测网络/ 077
3.2.1 RCNN 系列/ 077
3.2.2 RFCN / 079
3.2.3 Cascade RCNN / 080
3.3 单阶段目标检测网络/ 081
3.3.1 YOLO 系列/ 081
3.3.2 SSD 系列/ 086
3.3.3 RetinaNet / 088
3.4 无锚框目标检测网络/ 089
3.4.1 CornerNet / 089
3.4.2 CenterNet / 091
3.4.3 FCOS / 092
3.5 目标检测算法提升策略/ 093
3.5.1 多尺度检测/ 093
3.5.2 样本均衡化/ 094
3.5.3 上下文信息/ 096
3.5.4 非极大值抑制/ 097
3.5.5 边界框回归/ 098
3.6 本章小结/ 099
第4 章
面向智能驾
驶复杂场景
的多任务感
知关键技术
4.1 目标跟踪/ 101
4.1.1 传统目标跟踪方法/ 102
4.1.2 基于深度学习的目标跟踪方法/ 104
4.1.3 目标跟踪技术存在的难点/ 107
4.2 语义分割/ 108
4.2.1 传统语义分割方法/ 108
4.2.2 基于深度学习的语义分割方法/ 110
4.2.3 语义分割常用数据集/ 112
4.2.4 语义分割技术存在的难点/ 114
4.3 实例分割/ 115
4.3.1 基于检测的实例分割方法/ 117
4.3.2 基于像素聚类的实例分割方法/ 119
4.3.3 单阶段实例分割方法/ 121
4.3.4 实例分割技术存在的难点/ 123
4.4 本章小结/ 125
第5 章
车联网场景
下多传感器
融合感知技术
5.1 车联网多传感器融合系统概述/ 127
5.2 车联网多传感器信息融合的关键感知设备/ 129
5.2.1 摄像头/ 130
5.2.2 激光雷达/ 132
5.2.3 毫米波雷达/ 133
5.2.4 超声波传感器/ 134
5.2.5 GPS 和IMU / 135
5.2.6 V2X / 137
5.3 车联网多传感器融合方法/ 138
5.3.1 融合策略/ 138
5.3.2 多传感器融合中的深度学习架构/ 141
5.3.3 车联网场景中常用的多传感器融合方法/ 142
5.4 车联网多传感器融合技术中的关键问题/ 149
5.4.1 多传感器数据同步/ 149
5.4.2 信息融合算法/ 151
5.4.3 数据隐私与安全/ 152
5.4.4 融合中的传感器类型/ 154
5.4.5 监管和立法/ 154
5.5 车联网多传感器融合技术中的发展趋势/ 155
5.6 本章小结/ 156
第6 章
复杂场景感
知中的边缘
计算技术
6.1 边缘计算概述/ 157
6.2 边缘计算架构设计/ 158
6.2.1 边缘计算模型/ 158
6.2.2 边缘云与核心云/ 159
6.2.3 边缘硬件设备/ 161
6.2.4 边缘计算的工程应用/ 163
6.3 5 G 边缘计算技术/ 164
6.3.1 5G 与边缘计算的融合/ 164
6.3.2 5G 边缘计算的关键技术/ 167
6.3.3 5G 边缘计算的挑战与解决方案/ 168
6.4 边缘计算安全/ 170
6.4.1 边缘计算安全概述/ 170
6.4.2 边缘计算安全架构设计原则/ 172
6.4.3 边缘计算安全的关键技术/ 173
6.5 边缘计算开源平台/ 174
6.5.1 开源平台概述/ 174
6.5.2 EdgeX Foundry / 176
6.5.3 Akraino Edge Stack / 178
6.5.4 KubeEdge / 179
6.6 本章小结/ 180
第7 章
复杂感知技
术在智能驾
驶场景中的
实际应用
7.1 障碍物检测及跟踪/ 181
7.1.1 障碍物检测及跟踪任务讨论/ 181
7.1.2 具体检测目标的应用/ 183
7.1.3 车联网对障碍物检测及跟踪的影响/ 188
7.2 碰撞预警与制动/ 189
7.2.1 碰撞预警与制动任务讨论/ 189
7.2.2 车联网对碰撞预警与制动的影响/ 191
7.3 自动泊车/ 192
7.3.1 自动泊车任务讨论/ 192
7.3.2 车联网对自动泊车的影响/ 193
7.4 高精度地图建模/ 195
7.4.1 高精度地图建模任务讨论/ 195
7.4.2 车联网对高精度地图建模的影响/ 196
7.5 智能驾驶在典型特殊场景中的落地应用/ 197
7.5.1 机场自动驾驶托运车/ 197
7.5.2 矿业自动驾驶货车/ 199
7.5.3 港口货运自动驾驶货车/ 200
7.5.4 自动驾驶清扫车/ 202
7.6 本章小结/ 204
参考文献/ 205
展开