第3章
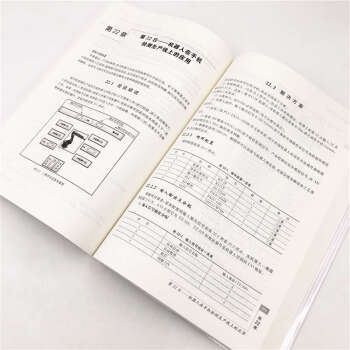
第3日——使工业机器人动起来
【学习目的】
第3日的学习内容是“让机器人动起来”,通过前两天的学习准备,读者应该已经了解了一些机器人的简单知识,完成了机器人的连接。现在要使用“示教单元”使机器人动起来,破除对机器人的神秘感,学习使用示教单元的基本方法和使机器人运动到指定工作位置点的方法。
3.1示教单元及其各按键的作用
示教单元也称为“手持式操作单元”,由于常用于操作机器人确认各“位置点”,所以一般称为“示教单元”。
操作单元有许多功能,正确使用操作单元可以起到事半功倍的效果。
学习示教单元上各按键的功能是很有必要的,学习者必须认真学习,多做实验。以下以三菱机器人示教单元R32TB为例进行说明,如图31所示。
图31示教单元各按键的功能
① EMG.STOP急停开关
在任何状态下(手动或自动)按下本开关,都可以使机器人进入“急停状态”(伺服=OFF),停止一切运动。
② TB ENABLE使能开关
本开关用于切换示教单元上各按键的有效/无效状态,是一个重要而且常用的开关。按下TB ENABLE开关,TB ENABLE灯亮,表示TB ENABLE=ON,示教单元操作有效。同时,示教单元操作有优先权,其他外部设备无法操作机器人。
③ 使能开关
本开关也是使能开关。在“手动模式”下,将本开关拉到中间位置,即可以使伺服=ON,而本开关在自由位置和“拉到底位置”时,均处于伺服=OFF状态,所以也称为“三位置开关”(自由位置、中间位置、拉到底位置),是对示教单元进行多重保护的一个开关。
④ 显示屏
显示屏用于显示相关的数据。
⑤ 显示状态灯
POWER: 电源灯,电源ON时,POWER=绿灯。
ENABLE: 使能状态灯,示教单元有效时,ENABLE=绿灯。
SERVO: 伺服系统状态灯,伺服系统ON时,SERVO=绿灯。
ERROR: 报警状态灯,机器人出现报警时,ERROR=红灯。
⑥ F1~F4键
F1~F4键用于选择显示屏上对应位置的功能,称为功能键。
⑦ FUNCTION功能键
FUNCTION功能键用于切换显示屏上的功能菜单。显示屏最下部一次只能显示4种功能,如果显示界面的功能多于4个,使用FUNCTION功能键进行切换。
⑧ STOP键
STOP键用于停止正在运行的程序,使运动中的机器人减速停止。
⑨ OVRD+、OVRD-速度倍率改变按键
OVRD+、OVRD-速度倍率改变按键用于改变“速度倍率”。
⑩ JOG操作键
JOG操作键用于JOG运行时指令各轴的运动(X+,X-,C+,C-)。
SERVO键
SERVO键用于设置伺服系统ON/OFF,注意在三位置使能开关=ON时才有效。
MONITOR键
MONITOR键为监视模式选择键。MONITOR=ON时,示教单元进入监视模式,可监视机器人系统的运动状态。
JOG键
JOG模式选择键。JOG=ON时,系统进入JOG状态,可以进行各种JOG操作。这是最常用的一个按键。
HAND键
HAND键为抓手模式选择键。
CHARACTER键
CHARACTER键为数字/文字切换键,用于切换输入时是数字还是文字。
RESET复位键
RESET复位键用于解除报警状态。同时按下RESET+EXE键可执行程序复位。
光标键
CLEAR删除键
CLEAR删除键用于删除光标所在位置的内容。
EXE执行键
EXE执行键用于对输入的内容进行确认。
连续按EXE键,机器人会动作。
数字/文字键
数字/文字键用于输入数字或文字。
3.2如何使机器人动起来
在学习了解了示教单元上各个按键的作用之后,现在的任务是让机器人动起来,以破除初学者对机器人的神秘感。
让机器人动起来的步骤如下。
(1) 将机器人本体与控制器正常连接。
(2) 将示教单元连接于控制器上。
(3) 暂时不连接其他输入输出信号和操作面板。
(4) 检查安全完毕后上电。
(5) 将TB ENABLE开关按下,确认TB ENABLE灯亮,这时示教单元为有效状态。
(6) 将三位置使能开关轻拉至中间位置并保持在该位置。
(7) 按下SERVO按键,等待SERVO绿灯亮。稍后可听见“滴”一声,表示机器人伺服系统=ON。
(8) 选择“速度倍率OVRD”=10%。
(9) 观察机器人本体的位置,确保机器人动作范围内无障碍物。
(10) 按下JOG键,选择JOG模式(按键13)。
注意: 现在已经进入JOG模式,必须注意安全动作。
(11) 以“点动”方式,逐一按下J1~J6键,观察机器人的动作。
如果机器人能够正常运行,就达到了第一阶段的目的。
3.3学习操作各种JOG模式
机器人不同于其他“运动控制器”的特点之一就是,即使是在JOG模式下,也有很多类型的JOG动作,这取决于采用的不同的“坐标系”。
3.3.1关节型JOG
1. 关节型JOG
如图32所示以关节轴为对象,以角度为单位实行的“点动操作”就是关节型JOG,可以对J1~J6轴分别执行JOG操作。
图32关节型JOG示意图
2. 操作步骤
(1) 将TB ENABLE开关按下,确认TB ENABLE灯亮,这时示教单元为有效状态。
(2) 将“三位置使能开关”轻拉至中间位置并保持在该位置。
(3) 按下SERVO按键,等待SERVO绿灯亮。稍后可听见“滴”一声,表示机器人伺服系统=ON。
(4) 按下JOG键,选择JOG模式(按键13)。
(5) 根据显示屏上最下排的显示,按下F1~F4键,(选择“直交”)。
(6) 以“点动”方式,逐一按下X、Y、Z、A、B、C按键,观察机器人的动作。
3.3.2直交型JOG
1. 模式
在直交型JOG中,以如图33所示的坐标系为基准,即以“世界坐标系”为基准,机器人控制点在X/Y/Z方向上以mm为单位运动。而A/B/C轴的运动则是旋转运动,
图33直交型JOG示意图
以角度为单位。在旋转时,机器人控制点位置不变,抓手的方位改变。
2. 操作步骤
(1) 将TB ENABLE开关按下,确认TB ENABLE灯亮,这时示教单元为有效状态。
(2) 将“三位置使能开关”轻拉至中间位置并保持在该位置。
(3) 按下SERVO按键。等待SERVO绿灯亮。稍后可听见“滴”一声,表示机器人伺服系统=ON。
(4) 按下JOG键,选择JOG模式(按键13)。
(5) 根据显示屏上最下排的显示,按下F1~F4键(选择“直交”)。
(6) 以“点动”方式,逐一按下X、Y、Z、A、B、C按键,观察机器人的动作。
3.3.3TOOL型JOG
1. 模式
TOOL型JOG就是以“TOOL坐标系”为基准进行的JOG运行,如图34所示。
这种TOOL型JOG以“TOOL坐标系”为基准,在TOOL坐标系的X/Y/Z方向做直线运动,单位为mm。在A/B/C轴方向做旋转运动,以角度为单位。
TOOL型JOG与直交型JOG的不同就是依据的坐标系不同,所以使用时要预先设置MEXTL 参数,也就是预先设置TOOL坐标系。
图34TOOL型坐标系示意图
2. 操作步骤
(1) 将TB ENABLE开关按下,确认TB ENABLE灯亮,这时示教单元为有效状态。
(2) 将“三位置使能开关”轻拉至中间位置并保持在该位置。
(3) 按下SERVO按键,等待SERVO绿灯亮。稍后可听见“滴”一声,表示机器人伺服系统=ON。
(4) 按下JOG键,选择JOG模式(按键13)。
(5) 根据显示屏上最下排的显示,按下F1~F4键(选择TOOL)。
(6) 以“点动”方式,逐一按下X、Y、Z、A、B、C按键,观察机器人的动作。
3.3.4三轴直交型JOG
1. 模式
三轴直交型JOG在X/Y/Z方向上是以“世界坐标系”为基准,移动单位是mm。但是A/B/C三轴的移动则是对应J4/J5/J6轴,以角度为单位,
图35三轴直交型JOG示意图
如图35 所示。这种方式综合了两种坐标系的优势。
2. 操作步骤
(1) 将TB ENABLE开关按下,确认TB ENABLE灯亮,这时示教单元为有效状态。
(2) 将“三位置使能开关”轻拉至中间位置并保持在该位置。
(3) 按下SERVO按键,等待SERVO绿灯亮。稍后可听见“滴”一声,表示机器人伺服系统=ON。
(4) 按下JOG键,选择JOG模式(按键13)。
(5) 根据显示屏上最下排的显示,按下F1~F4键(选择“三轴直交”)。
(6) 以“点动”方式,逐一按下X、Y、Z、A、B、C按键,观察机器人的动作。
3.3.5圆筒型JOG
1. 模式
圆筒型JOG首先要建立一个圆筒型坐标系。如图36所示,在圆筒型坐标系中,X坐标表示圆筒的半径,Z坐标表示圆筒的高度,Y坐标表示圆筒
的旋转角度(也就是J1轴的角度)。其余A/B/C轴的旋转方向如图36所示。这样圆筒型JOG就相当于
图36圆筒型坐标系
机器人控制点在一个圆筒壁上做运动。或者说,如果是一个圆筒壁上的运动,就选取圆筒型JOG最为适宜。
2. 操作步骤
(1) 将TB ENABLE开关按下,确认TB ENABLE灯亮。这时示教单元为有效状态。
(2) 将“三位置使能开关”轻拉至中间位置并保持在该位置。
(3) 按下SERVO按键,等待SERVO绿灯亮。稍后可听见“滴”一声,表示机器人伺服系统=ON。
(4) 按下JOG键,选择JOG模式(按键13)。
(5) 根据显示屏上最下排的显示,按下F1~F4键(选择“圆筒JOG”)。
(6) 以“点动”方式,逐一按下X、Y、Z、A、B、C按键,观察机器人的动作。
3.3.6工件型JOG
1. 模式
工件型JOG就是以工件坐标系进行的点动操作。事实上,如果要做轨迹型的运动,工件的图纸是已经设计完毕的。工件的安装与机器人的相对位置也是固定的。工件坐标系如图37所示,所以工件JOG就是沿着工件坐标系进行的JOG运动,与直交型JOG相同,只是坐标系位置不同。
图37工件型JOG示意图
机器人控制点在X/Y/Z方向上以mm为单位运动。而A/B/C轴的运动则是旋转运动,以角度为单位。
2. 操作步骤
(1) 将TB ENABLE开关按下,确认TB ENABLE灯亮,这时示教单元为有效状态。
(2) 将“三位置使能开关”轻拉至中间位置并保持在该位置。
(3) 按下SERVO按键,等待SERVO绿灯亮,稍后可听见“滴”一声,表示机器人伺服系统=ON。
(4) 按下JOG键,选择JOG模式(按键13)。
(5) 根据显示屏上最下排的显示,按下F1~F4键(选择“工件JOG”)。
(6) 以“点动”方式,逐一按下X、Y、Z、A、B、C按键,观察机器人的动作。
3.4需要思考的问题
(1) 使用示教单元进行JOG运行的基本步骤有哪些?
(2) 什么是关节型JOG?
(3) 什么是直交型JOG?
第4章
第4日——使用示教单元进行
编程、调试及设置参数
【学习目的】
第4日的学习内容是对示教单元功能的深度学习,要充分理解“示教单元”的丰富功能。即使在没有计算机的情况下,只要有“示教单元”就可以进行编程、调试,设置参数,驱动机器人正常运行。
4.1示教单元的“整列”功能
1. 功能
“整列”功能就是使机器人的抓手就近回到距离“当前位置”最靠近的90°方向,如图41所示。在实际应用中,如果需要抓手迅速对准工件,这是一种快捷的方法。
(1) 如果没有设置“TOOL坐标系”,经过“整列”后,抓手就到达图中的前一个位置。
(2) 如果设置了“TOOL坐标系”,经过“整列”后,抓手就到达图中的后一个位置。
可以看到是以“控制点”为基准,“控制点”位置不变,抓手的位置发生改变。
2. 操作步骤
(1) 选择“手动模式”。
(2) 将TB ENABLE开关按下,确认TB ENABLE灯亮,这时示教单元为有效状态。
(3) 将“三位置使能开关”轻拉至中间位置并保持在该位置。
(4) 按下SERVO按键,等待SERVO绿灯亮。稍后可听见“滴”一声,表示机器人伺服系统=ON。
(5) 按下HAND键,显示“抓手”界面如图42所示。
图41整列位置示意图
图42“抓手”界面
(6) 按下并保持(按下)对应“整列”功能的F2键,机器人动作,执行“整列”动作。
4.2程 序 编 辑
示教单元的重要功能之一是可以编辑程序,不使用“编程软件”也可以完成程序编辑的相关任务。相关的指令可在后续章节学习。
以下是编辑程序的步骤。
(1) 上电后,按EXE键进入菜单界面,选择进入“管理/编辑”界面。
(2) 按下对应“新建”功能的F3键,进入如图43所示界面。
图43新建一个程序
(3) 输入程序名,按EXE键,进入如图44所示指令编辑界面。
图44对新程序命名
(4) 进入指令编辑。以输入以下程序为例:
1Mov P1
2Mov P2
3End
① 按下对应“插入”功能的F3键,进入“插入编辑”状态,如图45所示。
图45程序输入编辑界面
② 输入“步序号”; 按CHARACTER键,选择数字输入,输入数字“1”,进入如图46所示界面。
图46程序步序号输入编辑界面
③ 输入“MOV P1”指令。注意在“MOV”和“P1”之间有空格,如图47所示。
图47程序输入界面
④ 输入程序的确认。
在输入了程序指令后,还要进行“确认”操作,即对输入的程序指令进行确认。操作如下。
选定程序行(例如选择1 MOV P1 )→按EXE键。
如图48所示光标移到下一行。同样的操作,可以对所有的程序行进行确认。
图48程序输入确认界面
⑤ 编制程序结束。
在编制程序结束后,按“关闭”键,回到上一级菜单“管理/编辑”,如图49所示。
图49回到上一级菜单“管理/编辑”
……
展开